Contromisure all' infrarosso
Trattazione sull'utilizzo dell'infrarosso nei sistemi di difesa militari.
![]()
Infrarosso : tecniche difensive.
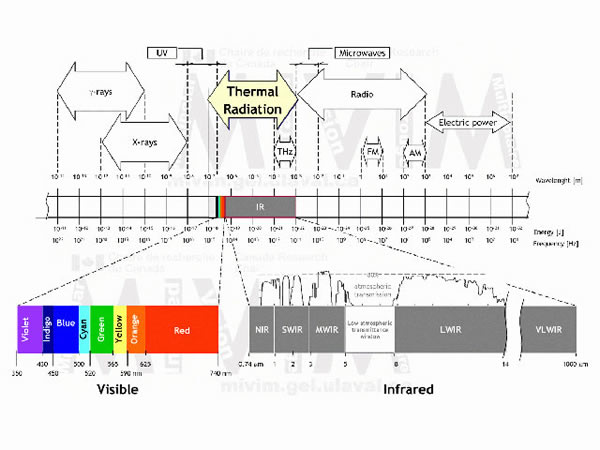
Subito dopo le onde millimetriche, ma prima del visibile, incontriamo l’infrarosso (IR). Una regione estesa, per convenzione, da 1000 fino a circa 0,75 micron. Viene divisa in 3-4-5 settori (un esempio nella tabella), a seconda delle necessità.
Benché esistano sensori infrarossi attivi, ci occuperemo solo di quelli passivi, ampiamente utilizzati su moltissimi missili a corto e medio raggio. Anche in questo settore si sono verificati enormi progressi. Nei sensori e nelle contromisure adatte a contrastarli.
Un velivolo emette energia infrarossa in molti modi.
Allo scarico: un tipico motore raggiunge temperature variabili tra 600 e oltre 800°C senza postbruciatore (ma vi sono motori “freddi” che non superano i 400°C) e fino a 2000°C con il postbruciatore inserito. La scia calda, ad oltre 100 metri dietro il velivolo, raggiunge ancora oltre 100°C col postbruciatore inserito.
Sulle lamiere di rivestimento dei motori.
Per il calore emesso dai componenti elettronici.
Sulle superfici, a causa del riflesso solare. Un velivolo in alluminio non verniciato riflette la luce solare a molte decine di Km di distanza (fino a 100 km). Le vernici riducono la riflessione al 50-60% (ancor più i grigi anti-IR : 5-15%). Ma l’emissione è rilevabile.
Sul tettuccio, che riflette così tanto i raggi solari da consentire l’aggancio di un sensore moderno.
Sul cono anteriore, sui bordi delle prese d’aria e delle ali per attrito aerodinamico.
Sono stati realizzati diversi tipi di sensori (fotoconduttivi/fotovoltaici) sensibili a queste frequenze, che utilizzano materiali quali il Solfuro di Piombo (PbS), l’Antimoniuro di Indio (InSb), il Tellururo di Mercurio e Cadmio (HgCdTe), il Seleniuro di Piombo (PbSe), solo per citare i principali. Raccolgono l’energia incidente e la convertono in segnali elettrici per la guida sul bersaglio. Più un oggetto è caldo più sarà corta la lunghezza d’onda emessa e maggiore l’intervallo di lunghezze d’onda interessato. Il “picco”di energia si può calcolare con la formula: LT=2900 dove L è la lunghezza d’onda in micron e T la temperatura in kelvin.
Oggetti a 30° emettono attorno ai 10 micron, a 200°C irradiano tra 3 e 10 micron (picco a 6), a 500°C tra 2 e 10 micron (picco a 4). Un motore a 2000°C avrà un picco di emissione a 1,3 micron e irradierà molto anche nel visibile. Così scia, motore, fusoliera, scarico differiranno tutti nella frequenza di picco. Come se non bastasse, una temperatura doppia comporta una emissione 16 volte più alta. Dato l’impiego di frequenze più alte, anche la definizione è superiore. Così se un radar con una grande antenna può distinguere due bersagli solo se questi sono separati da decine di metri, un sensore IR con una apertura di pochi cm, è in grado di distinguere i singoli motori di un velivolo. A differenza delle onde elettromagnetiche di elevata lunghezza d’onda impiegate dai radar però, le radiazioni infrarosse subiscono forti assorbimenti da parte dell’atmosfera (lo stesso avviene già con le onde millimetriche). La presenza, principalmente, di vapore acqueo e biossido di carbonio permette una buona trasmissione solo in corrispondenza di alcune “finestre” situate all’incirca a 1,8-3 micron (onde corte: banda 1), 3-5 micron(medie: banda 2) e 8-13 micron (lunghe: banda 3). Se la concentrazione di vapore sale, aumentano i fenomeni di diffusione perché la dimensione delle particelle è comparabile alla lunghezza d’onda. Nubi e nebbie poi, contengono goccioline di 1 micron e provocano una bassissima trasmissione IR. A causa dell’assorbimento atmosferico tra 5 e 8 micron, un sensore in grado di agganciare un motore opererà sui 2-4 micron. Se invece l’obiettivo è rilevare la fusoliera, si concentrerà sugli 8-10 micron.
I primi sensori al Solfuro di Piombo (PbS), monocolore, operavano su lunghezze d’onda cortissime (1-2,5 micron) e potevano così agganciare solo le radiazioni emesse dal metallo rovente del cono di scarico (o dal sole, con effetti immaginabili …), consentendo l’attacco solo nel settore di coda. Il raffreddamento (es.: azoto sugli Aim-9D, termoelettrico sugli Aim-9E/J) ha esteso a 4 micron l’impiego del PbS, permettendo di rilevare anche le emissioni del flusso di scarico. Altri materiali molto più sensibili, come l’Antimoniuro di Indio (InSb), abbinati al raffreddamento del sensore (Argon sugli Aim-9L) rendono possibile, in certe condizioni, l’attacco “All aspect”. Già i sensori di missili come il Red Top potevano teoricamente dirigere l’arma verso il bordo di attacco delle ali dei velivoli in volo supersonico o verso il riflesso del sole sul tettuccio dei velivoli. I sensori in grado di rilevare più bande sono definiti bi-colori. Sono intrinsecamente più difficili da disturbare con flare e jammer.
Sensori a Reticolo: i modulatori.
Per distinguere il bersaglio dallo sfondo la prima soluzione è stata il reticolo rotante, posto tra il filtro spettrale (che dà quel colore ambrato) e il sensore. Molto schematicamente, il reticolo (o lo specchio) rotante è formato da due parti: la prima è formata da segmenti simili a palette di ventola opachi e trasparenti, alternati. La seconda parte è semitrasparente, con un fattore di trasmissione uguale alla media della prima parte. Ruotando ad elevata velocità costante (variabile nei più recenti), il reticolo interrompe la radiazione incidente, creando un segnale alternato e rendendo possibile separare i dati del bersaglio dal clutter perché, al contrario delle sorgenti puntiformi, le fonti di rumore esteso (nubi, mare, terreno) impegnano più settori contemporaneamente. Il risultato è un treno di impulsi sincronizzati col movimento del reticolo, pari agli intervalli di tempo in cui il bersaglio si trova in corrispondenza dei settori trasparenti. Quando la prima metà passa sopra il bersaglio, giungeranno serie di impulsi singoli dal bersaglio e dallo sfondo (onde quadre). Quando la parte semitrasparente passa sul bersaglio, si riceverà invece un segnale continuo. Considerando la durata (fase), il numero e l’ampiezza degli impulsi (maggiori quanto più il bersaglio è fuori asse) si possono determinare le coordinate angolari. La radiazione modulata passa infine per un filtro che elimina il clutter e la invia ai rilevatori.
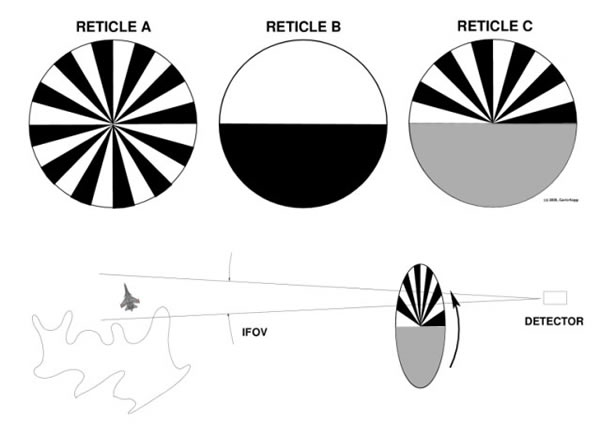
Il disegno reale dei reticoli è segreto (i disegni pubblicati sono semplificazioni). I reticoli impiegano schemi matematici molto complessi, con disegni ondulati o a zig-zag. La fabbricazione deve essere molto accurata; sistemi alternativi prevedono specchi concavi con lo schema a reticolo inciso sulla superficie. Il metodo non permette di ottenere un settore visivo (field of view: FOV) elevato e la modulazione sfrutta solo una parte dell’energia incidente. Questo sistema non fornisce, inoltre, dati direzionali se il missile è allineato perfettamente col bersaglio. Dato che i primi missili utilizzavano lo Spin Scanning e la modulazione d’ampiezza (AM) per determinare quanto il bersaglio era fuori asse, questo li costringeva ad un percorso sinuoso che riduceva la portata e portava ad un errore progressivo quando il missile si avvicinava al bersaglio ed il segnale diveniva più forte. Il passaggio alla modulazione di frequenza ha risolto il problema dato che è possibile discriminare meglio la distanza.
Come abbiamo visto nel caso dell' ”Attacco Elettronico”, anche qui esistono diversi tipi di contromisure, fisiche ed elettroniche.
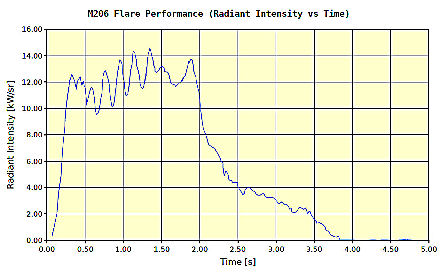
Flare: la prima contromisura efficace adottata contro questo sistema è stata il Flare (artificio pirotecnico), realizzato fin dagli anni ’60. Il Flare (attualmente MTV dai suoi componenti: Magnesio-Teflon-Viton) brucia ad alta temperatura, attorno ai 2000°C, con una emissività così alta nell’IR che il bersaglio diviene insignificante. La massima intensità deve essere raggiunta molto rapidamente perché deve equiparare quella del velivolo nel minor tempo possibile. L’esca deve poi bruciare abbastanza a lungo da permettere l’uscita dell’aereo dal campo visivo del sensore. I Flare devono essere lanciati preferibilmente in aria non perturbata da vortici (al contrario del Chaff). La velocità d’eiezione è sui 100 km/h (20-45m/s) ed è bene non superarla troppo. Perché il sensore nemico deve poterli tracciare nel suo campo visivo. E neppure ridurla eccessivamente, altrimenti la spoletta della testata potrebbe attivarsi a breve distanza. E’ consigliabile effettuare, nel frattempo, qualche brusca manovra evasiva e ridurre la potenza del motore. Sono efficaci al 100% contro missili di prima generazione (monocolori) ed ancora contro molti dei successivi. Vengono rilasciati in sequenza, per esempio uno ogni 0,25 secondi. Il Flare è contraddistinto da diversi parametri: ignition spike (lampo d’accensione), rise time (tempo per raggiungere la massima temperatura), intensità, durata massima, distribuzione spettrale, traiettoria, velocità, estensione spaziale (area IR apparente).

Deception jamming: un sistema diverso, e molto più sofisticato, è invece l’inganno. I sistemi a reticolo sono estremamente vulnerabili al disturbo in modulazione d’ampiezza (AM jamming), tecnica che prevede lampi da una sorgente IR (IR strobe jammer) ad una frequenza pari a quella di rotazione del reticolo. I forti impulsi IR, sovrapponendosi alla modulazione del reticolo, deformano la forma d’onda risultante inducendo in errore il sistema. La sequenza di impulsi risulta sconvolta ed è impossibile ricavare le coordinate angolari. L’elettronica aggancia gli impulsi di disturbo e guida il sensore lontano dal bersaglio, lo stesso principio di base del disturbo dei radar a scansione conica (ConScan: vedi “attacco elettronico”). Se la sincronizzazione è raggiunta, il missile si aggancerà al Jammer, troverà due o più bersagli nel campo visivo e comincerà a virare cercando di riacquisire quello vero. Se l’inganno ha successo (optical break-lock) raramente il sensore riacquisisce il bersaglio, dato il ristretto campo visuale (FOV). L’uso di un flare, può eventualmente dirigere altrove il sensore confuso.
Talvolta gli ingannatori sono efficaci anche contro i “con-scan seekers”(vedi dopo) , per altri motivi. Con l’inganno i falsi segnali arrivano al sensore che è disturbato da non-linearità (oscillazioni) o perdita di segnali. Benché apparentemente il sensore funzioni, la deflessione delle superfici di governo è insufficiente o distorta.
Difetti: il sistema è una forte sorgente attiva IR, rilevabile e tracciabile, che richiede schermatura nel visibile. Secondo: se la modulazione non è efficace, il risultato è peggiore e la fonte attirerà ancor più il missile. Si impiegherà così una modulazione che possa difendere dalle minacce supposte. Spesso è utilizzato per la protezione dei velivoli lenti, che altrimenti richiederebbero enormi quantità di flare, e copre un settore fisso, di solito a difesa della zona posteriore.

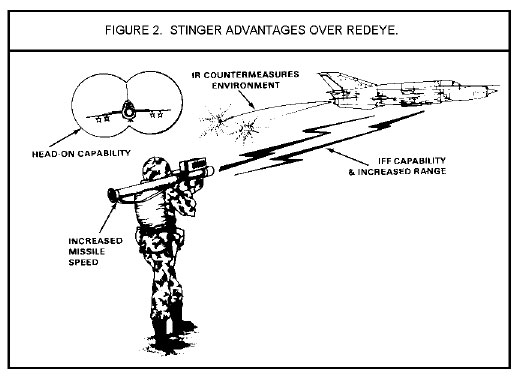
Il primo sistema d’inganno è stato l’Hot Brick: un blocco di materiale ceramico (per esempio allumina) portato a temperatura incandescente con un bruciatore di propano o cherosene. A questa classe di dispositivi apparteneva l’ALQ-132 impiegato in Vietnam (fuel fired flashlamp) fin dagli anni ’60. Sistemi successivi più avanzati e leggeri, come l’ALQ-144, sono riscaldati elettricamente. La radiazione emessa viene modulata con otturatori meccanici di vario tipo che si aprono e chiudono secondo la sequenza voluta, trasformandola in impulsi di durata e frequenza idonee al tipo presunto di minaccia. L’emissività deve superare quella del velivolo e la modulazione deve essere adattata alla velocità di rotazione del reticolo da affrontare (spin rate). E qui sorge un problema, perché la velocità degli otturatori non è modificabile oltre un certo limite. Così questi sistemi sono di capacità insufficienti contro i nuovi missili a causa dell’inflessibilità degli schemi di modulazione. La radiazione emessa è di notevole potenza (oltre 1 Kw), necessaria perché la radiazione è dispersa sui 360° (J/S: 2-8). Per una azione efficace si richiede una conoscenza preventiva delle caratteristiche dei missili nemici. Sfortunatamente si conoscono bene solo alcuni missili di vecchia generazione. Un ulteriore problema è dato dall’uscita spettrale. Gli impianti di questo tipo sono attivi in via continuativa (open loop jam). Sono in grado di far deviare un missile di centinaia di metri, far detonare la testata o persino impedire lo stesso “aggancio” al momento del lancio. Durante un esperimento contro missili Redeye, nel 1971, i 17 missili lanciati andarono tutti a vuoto. Spento il dispositivo, il 18° missile centrò subito il bersaglio.
Fino alla metà degli anni ‘70 questi sistemi si sono rivelati efficaci. Dopo di allora, i miglioramenti nelle capacità IRCCM (contro-contromisure) dei missili hanno reso insufficienti le prime esche e poco flessibili i primi ingannatori. Non ci è voluto molto prima che i progettisti iniziassero ad inserire alcune modalità particolari nei sistemi di processazione dei segnali, sfruttando alcune caratteristiche ineliminabili delle prime esche e le limitazioni spettrali e di modulazione degli ingannatori.
Tecniche di individuazione delle esche e contro-contromisure.
Tempo di insorgenza (Rise rate trigger): il sensore percepisce l’innalzamento improvviso del livello di energia provocato dal Flare, questo viene vagliato dai circuiti logici e confrontato con quello ritenuto “accettabile”come, per esempio, l’accensione di un postbruciatore o un cambio di potenza del motore. Se il livello viene superato, indicando la presenza di un inganno, il sensore rimane, per così dire, in attesa (closing “eyes”) usando i circuiti di memoria per mantenere il missile sulla rotta di collisione seguita fino a quel momento, e quando si riattiva, presumibilmente, il flare sarà fuori dal FOV(field of view), l’aereo invece sarà riacquisito.
Approccio temporale: simile. La testa attiva i circuiti quando il livello di energia è salito oltre un limite predeterminato. Il sistema può pilotare la testa in modo da distoglierla dagli alti livelli energetici ed indirizzarla verso la traccia più debole. Il circuito logico può disporre un filtro sulla parte del FOV coi più alti livelli energetici.
Approccio cinematico (Trajectory sensing): posizione dell’inganno rispetto all’aereo. Un filtro di attenuazione riduce l’accettabilità di una sorgente IR in un settore del FOV del sensore (reject sector), normalmente sul retro e inferiore al bersaglio rispetto al centro del FOV. Questo perché i flare, di solito, sono sparati verso il retro e il basso, per assicurare una separazione sicura. Si attenua così la sensibilità e l’inseguimento continua.
Approccio spaziale (Rearwards separation rate trigger): si tiene conto della velocità di separazione tra bersaglio e flare, verso il retro. A causa della gravità e della rapida perdita di velocità i flare si separano quasi sempre molto velocemente verso il basso e il retro.
Discriminazione spettrale (Spectral discrimination): i sistemi moderni utilizzano filtri ed elementi IR con due (o più) lunghezze d’onda diverse (bicolori) o sensori IR-UV, per discriminare tra esche e scia dello scarico, perché la distribuzione spettrale e temporale di un “flare” è molto diversa da quella generata dal velivolo. Un flare pirotecnico brucia per 5-10 secondi però il picco di energia radiante, oltre ad essere più alto, è raggiunto nei primi 1-2 secondi, poi subisce un brusco calo. E il flare è una sorgente puntiforme. Deve perciò bruciare a temperatura elevatissima per sviluppare un flusso radiante confrontabile. L’energia emessa è concentrata così su lunghezze d’onda inferiori a 2 micron (banda 1, radiazione di “corpo nero”), mentre l’aereo emette a lunghezze d’onda maggiori (bande 2-3, radiazione di “corpo grigio”). Un tipico flare brucia a 2000°C, un motore d’aereo a 600-800°C. I flare emettono quindi molto nell’ultravioletto e nel visibile. Il sensore, per comparazione, si aspetta di rilevare livelli di energia simili in tutte e due le bande. Se l’energia alla frequenze alte è superiore a quella alle frequenze più basse, la sorgente è un flare. E non basta. Le caratteristiche dei sensori bicolori sono così variabili (e così le loro IRCCM) che per ogni tipo di sensore servirebbe un diverso tipo di flare.
Kinematic filtering: si applica al sistema ottico uno spostamento in avanti, in modo che il flare esca dal FOV nel più breve tempo possibile ed il vero bersaglio venga riacquisito. Il missile è dotato di Forward-Bias o Track rate Bias per spingere il tracking lungo l’asse del bersaglio e il punto di intercettazione davanti alla scia (cessa quando il sensore è allineato con gli assi). Il sensore è temporaneamente spento mentre il flare cade lontano dal FOV del sensore.
Ed una nuova classe di sensori si è affacciata: gli Scanning seeker.
Conscan seeker: costituisce un passo intermedio. Il sensore è a reticolo fisso ed impiega sistemi per la rotazione/nutazione delle ottiche. Sugli AIM-9L, per esempio, il sensore è accoppiato con un sistema di scansione conica (Conscan AM/FM), che muove l’insieme delle lenti e degli specchi in cerchio con un movimento caratteristico, scansionando un largo settore. Il sistema di guida individua il bersaglio basandosi sulle fluttuazioni nell’energia IR rilevata mentre ruota attorno all’asse. La scansione conica consente migliore discriminazione delle esche e superiore sensibilità. Il percorso verso il bersaglio è più diretto ed aumenta così il raggio d’azione dell’arma.
Sequential scanner: esplorano il campo visivo in sequenza. Ciascun rilevatore ha un campo di vista istantaneo (IFOV) che è solo una parte minima di quello totale del sensore e viene interrogato secondo una sequenza prestabilita. Al termine del ciclo di scansione si elaborano le informazioni ricevute dai vari campi di vista e si determina la posizione del bersaglio nel campo visivo totale. Più i campi visivi sono piccoli più è ridotto il clutter e migliore la risoluzione. Un esempio (sullo Stinger Fim-92C e sul RAM) è il “Rosette scanner” (RSIS) (co-rotating vector scanner o pseudo imager) che utilizza un singolo rilevatore fisso ed almeno due dispositivi ottici mobili con un piccolo campo visivo istantaneo (IFOV). Questi esplorano il campo visivo totale con un percorso caratteristico che ricorda un fiore (rosetta) con petali multipli (10-20 e oltre). Rispetto ai precedenti sono più semplici in termini di meccanica, ottica e tipo di scansione. Richiedono però maggiore processazione dei segnali. Forniscono superiore velocità nell’afflusso dei dati e copertura di campo. Nella realizzazione sono necessari dei compromessi. Per essere insensibile allo sfondo, l’IFOV deve essere piccolo, ma se lo è troppo, non raggiunge la copertura richiesta.
Si ritengono insensibili alle esche. In realtà tutto dipende dal tipo di processazione del segnale e dagli algoritmi di discriminazione del bersaglio. La risoluzione dell’immagine del bersaglio è bassa. Così il sensore a rosetta non può riconoscere il bersaglio dalla forma. Inoltre bersagli troppo vicini, appaiono contemporaneamente nell’IFOV del sensore, individuati con un singolo impulso. Per esempio le esche appena lanciate. Per impedire al sensore di perdere l’aggancio (break-lock), è adottata una tecnica di “sblocco del segnale”: la testa non reagisce a quel settore del tracciato di scansione in cui c’è l’inganno. Quando un decoy è sganciato e si rilevano variazioni transitorie in ampiezza e durata degli impulsi, queste variazioni provocano l’inizio di un calcolo del movimento tra la posizione stimata del bersaglio e il centro dell’impulso, per determinare la direzione in cui è stata espulsa l’esca. Questi sensori, infatti sono “time-gated” (anche i radar usano “gate” come abbiamo visto) per evitare lo sganciamento dal bersaglio ad un flare in movimento rapido di allontanamento. Ma la possibilità di affrontare gli ingannatori ed i disturbatori IR moderni (come le lampade al Cesio) è discutibile.
Crossed-array tracker: è costituito da 4 sensori rettangolari disposti a croce : la posizione del percorso del bersaglio cambia allo stesso modo della nutazione dei sistemi a reticolo. Il segnale assume la forma di sequenza pulsante, non modulata come nei reticoli, così non è richiesta la demodulazione ed è perciò più semplice.
Lamp DIRCM: tutto questo ha favorito un’altra classe di dispositivi di inganno, molto più flessibili: le lampade ad arco. Utilizzano lampade a vapori di Cesio, Sodio o gas rari come lo Xeno o il Cripto. La modulazione è ottenuta comandando elettricamente l’accensione ad intermittenza, emettendo lampi con un codice selezionabile manualmente o automaticamente, che si presume possa interferire col sensore. Così si possono variare velocemente e con continuità gli impulsi generati e gli schemi di modulazione. La frequenza può superare i 100 hz adattandosi ad ogni tipo di reticolo. Purtroppo i rapidissimi cicli di accensione–spegnimento limitano la vita a qualche centinaio di ore, così che il dispositivo non può restare sempre acceso. E sono anch’essi rilevabili. Già utilizzate in Vietnam (AAQ-4, AAQ-8) e poi sul sistema ALQ-204 MATADOR (fino a 12 kw) sono state via via migliorate. Un esempio moderno è dato dalla prima serie del sistema AAQ-24 Nemesis che utilizza una lampada al Cripto che invia impulsi d’inganno ad alta potenza in un fascio ristretto puntato direttamente sul sensore nemico (DIRCM). E’ unito a dispositivi passivi di rilevamento MAW. Questi individuano le fonti infrarosse e le classificano in missili pericolosi, innocui e clutter. Poi attivano gli ingannatori. Non sono considerati però sufficientemente potenti per proteggere aerei di grandi dimensioni.


Un problema diverso è la necessità di ridurre la dipendenza dell’efficacia del disturbo da una preventiva conoscenza del sensore da affrontare. Questo può essere ottenuto con un generatore in grado di rendere casuali (random) i treni di impulsi modulati. E’ possibile rendere casuali spazi, tempi, forme d’onda e intensità, sempre sulla lunghezza d’onda del sensore minaccia.
Anche le esche, nel frattempo, hanno subito una evoluzione.
Flare più avanzati lanciati in avanti o lateralmente con traiettorie divergenti, per allontanarli dal velivolo pur mantenendoli nel raggio di visuale del sensore del missile. Oppure lanciati verso l’alto, come nei Mig-29. O in modo intelligente (smart flare), lanciati con una sequenza temporale/spaziale in grado di sedurre il sensore (Gate Stealing).
http://www.darkroastedblend.com/2007/09/firing-countermeasures-flares.html
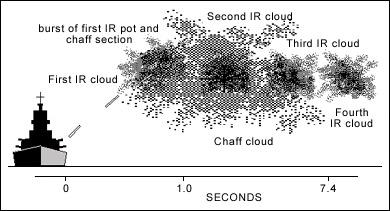
Il discorso vale anche per le navi:

Flare multispettrali (hot-cold flare): mantengono il livello totale di energia prodotta distribuendolo, nel periodo di tempo, secondo un profilo di combustione diverso e simile a quello del velivolo, ingannando così i sensori bicolori. Già impiegate in azione (Iraq), hanno dato risultati controversi.
Aerodynamic Flare: sono progettati per superare i missili dotati di “trajectory sensing” o “separation rate trigger”. Un musetto aerodinamico combinato con il lancio verso l’avanti, assicura una separazione lenta, superando le IRCCM che verificano la “rearwards separation rate”. Sfortunatamente, di solito, questo tipo di flare è adatto solo per velivoli lenti, perché all’aumentare della velocità l’efficacia si riduce.
Kinematic Flare o Thrusted Flare: consentono di superare le limitazioni dei precedenti. Dopo il lancio estendono delle alette ed accendono un piccolo propulsore. Volano ad una certa distanza dal velivolo operando come esca contro missili dotati di FORWARD-BIAS. In alternativa possono invece rilasciare materiale piroforico (Special material decoy).
Flare piroforiche: un incremento di efficacia può essere ottenuto incrementando l’area radiante invece che la temperatura. Le piroforiche hanno un comportamento diverso rispetto alle pirotecniche ed offrono un buon potenziale di sviluppo poiché producono un segnatura IR su 2 bande che non consente al missile di discriminarla come esca. I componenti sono di solito solidi come fosforo, zirconio, uranio impoverito, ma si sono tentati anche esperimenti con liquidi (alkyl aluminum) e gas, difficili vista la necessità di contenitori assolutamente ermetici. Il materiale diffuso nell’aria reagisce istantaneamente con l’ossigeno, utilizzato come ossidante. Le sostanze impiegate, combustibili a bassa temperatura, non producono luce visibile. Sono così utilizzabili anche da velivoli Stealth in volo notturno. Dato il basso livello di energia sono utilizzati, di solito, come contromisure preventive (prima del “lock on”) per velivoli privi di sistemi MAW. Nel caso di bersagli dotati di soppressori infrarossi o dalla bassa traccia infrarossa si possono utilizzare anche come contromisure reattive (dopo il “lock on”).

Hot Chaff: Chaff rivestito con materiale piroforico che emette radiazione IR quando esposto all’aria. Genera anch’esso una traccia su due bande, generando temperature di 800°C, vicine a quella del motore. Può essere lanciato per produrre nubi di calore di varie dimensioni in grado di creare esche o un vero e proprio schermo infrarosso. E’ più sicuro da immagazzinare e maneggiare dei comuni piroforici.
Sfortunatamente per i creatori di Flare, un’altra minaccia è arrivata.
Imaging seeker (IIR) o Focal plane array (FPA): sono formati da una schiera planare di centinaia di elementi rilevatori IR/UV distribuiti a mosaico sul piano focale che esplorano simultaneamente l’intero campo, ricreando una immagine termica della scena osservata (come le fotocamere CCD) ed individuando così il bersaglio, con superiore sensibilità. Ottengono la copertura come somma dei campi visivi elementari. L’assenza di dispositivi di scansione meccanici consente di elaborare i segnali velocemente anche se è richiesta una maggiore processazione del segnale, e rigettare un rumore di fondo molto forte. La costruzione è relativamente semplice e resiste bene alle accelerazioni. Può rilevare e seguire più bersagli contemporaneamente. I sensori attuali IIR ad immagine termica rendono estremamente difficoltoso realizzare esche efficaci. E potenzialmente possono identificare il bersaglio analizzandone le forme. I flare sono inefficaci perchè non mostrano contorni o bordi nelle basse frequenze. Possono poi usare un circuito di rifiuto per cancellare quegli impulsi di energia che non arrivino nel momento ritenuto corretto, dalla logica della testa cercante, per la risposta del vero bersaglio, mettendo fuori gioco gli ingannatori come gli ALQ-144.
E’ il caso di citare anche i sistemi FLIR che, impiegati potenzialmente come sensori di scoperta, costituiscono una probabile minaccia.
Per ingannarli si è ipotizzato l’uso di disturbatori IR in controfase alle estremità alari, sull’esempio del sistema di inganno radar Cross-Eye. Ma le frequenze adoperate non garantirebbero la sicurezza del vettore, il missile verrebbe deviato solo di poco e in fase di attacco terminale.
Anche i Towed decoy (esca rimorchiata) con sorgenti IR sono facilmente riconoscibili da un sensore IIR.
L’unica soluzione è l’utilizzo di un “disturbatore a saturazione”, concettualmente simile ai disturbatori di sbarramento impiegati contro i radar: una sorgente la cui emissività è tale da abbagliare (saturare) o persino danneggiare gli elementi rilevatori. E la sorgente migliore per ottenere lo scopo è un fascio di luce coerente: il laser.
Laser DIRCM: dopo numerosi esperimenti condotti nel decennio precedente, è divenuta da poco operativa una nuova serie di dispositivi d’inganno/disturbo che utilizza proprio il laser. Affidabili, meno costosi, più leggeri e di minori dimensioni rispetto ai precedenti ingannatori. Evitano i settori fissi e le zone d’ombra montando le sorgenti su torrette mobili, cosa che consente pure una discreta manovrabilità al vettore.
I sistemi più moderni già operativi come l’AAQ-24(V) Nemesis o il prossimo MUSIC, operano in modalità Closed Loop: i sensori MAW (Missile approach warner) rilevano da almeno 5 Km di distanza la traccia UV (Plume) del missile in arrivo separandola dal clutter. La torretta laser ruota e punta la traccia. La riflessione del raggio laser indica se il missile è IR (disturbabile) o un altro tipo. E permette di distinguere un sensore a reticolo da uno a scansione o da uno IIR. Inizia il disturbo. Gli impulsi laser vengono emessi simultaneamente su lunghezze d’onda multiple e su tutte le bande spettrali IR. Il dispositivo valuta in tempo reale l’effetto del disturbo, rilevando i segnali che causano un break-lock momentaneo, e calcola il codice ottimale degli impulsi successivi. Così l‘aggancio può essere interrotto più velocemente, al contrario dei vecchi sistemi che usavano codici di disturbo generici e non ottimizzati. Lo schema di modulazione può essere variato, quindi, per controbattere tutti i tipi di seeker. Operando in Time-sharing i laser sono in grado di affrontare bersagli multipli. Le torrette, dopo ottenuto il Break-lock, ruotano ad alta velocità puntando il bersaglio successivo dopo soli 3-4 secondi (meno di un secondo per il MUSIC). Nel corso di un esperimento si sono attaccati ed eliminati simultaneamente 4 sensori di missili in due bande diverse a distanze da molte centinaia di metri fino a 3 Km. L’intero processo di rilevamento/attacco dura pochi secondi.
In questo video si vede l’effetto di un laser difensivo. Un AAQ-24(V) Nemesis su di un AH-64.

In senso assoluto, i laser non richiedono elevate energie perché il fascio coerente è focalizzato nel FOV del sensore, quindi hanno un elevatissimo rapporto disturbo/segnale (J/S). Il disturbatore laser invia un segnale d’interferenza in modulazione di frequenza/fase/ampiezza, saturato molte volte (da 2 a molte decine) rispetto a quello emesso dal velivolo, in grado di mettere fuori gioco sensori infrarossi con elevato grado di immunità ai disturbi convenzionali. La radiazione modulata produce segnali spuri multipli che confondono il sensore con falsi bersagli, alterando la traiettoria e deviando il missile, o lo accecano completamente, provocando la perdita totale del bersaglio. Aumenta anche la ”miss distance” che dipende dal tempo impiegato per ottenere il break-lock e dall’efficienza nel deviare il missile. Sono molto efficaci contro sensori con un lento “Auto Gain Control”: in questo caso esiste la possibilità reale che il laser danneggi irreparabilmente il “seeker” nemico.

Un problema può derivare dal fatto che il fascio laser può trovarsi ad attraversare la scia turbolenta del velivolo ed essere degradato. L’atmosfera è composta di strati di differenti gas e temperature che possono deviare Il fascio laser. La sperimentazione, però, ha finora dato esito positivo, ben oltre le aspettative. Quello che manca è un esteso impiego operativo che, si può esserne certi, non mancherà. La diffusione a bordo di aerei da combattimento veloci seguirà presto, creando un problema per ora insolubile ai progettisti di missili che potrebbero trovarsi ad affrontare un giorno laser e armi HPM in grado di mettere fuori uso i missili attuali.

Un buon articolo sull’argomento, anche se datato, è apparso su Rivista Aeronautica n°6 del 1993 (Basilio di Martino: le contromisure all’infrarosso). Poco è disponibile su altre pubblicazioni. Rivista Italiana Difesa ha trattato qualche volta le IRCM. Ma esiste sufficiente materiale in rete.
by Gian Vito
2009